





4 、纵稳性
与普通排水型船不同,因为小型快艇的L/B相对较小,导致纵稳心半径小,据统计艇长在10m以下的游艇,其H/LW=1.1~1.6(H--纵向初稳性高;LW—水线长),因此保证纵向稳性是小型快艇设计中的一个重要问题。
应适当减小FRP游艇的进水角,并使浮心位置后移,这对减小剩余阻力是有利的。为了减少高速艇的“海豚”现象,建议适当地把重心往前移向艇舯,浮心位置应位于重心之后附近,使游艇在静水中处于轻微首倾,在航行中随着速度的提高,浸水线不断向后缩短,浮心逐渐后移与水动力所产生的升力作用线合成使游艇首部抬起,这时不至于因升力作用点沿纵向变化而远离重心发生过大的纵向摇摆,即有利于纵向稳性。笔者对艇长在10m以下的小型游艇的浮心纵向位置LCB进行了统计,其取值范围在舯后(7%~10%)L。
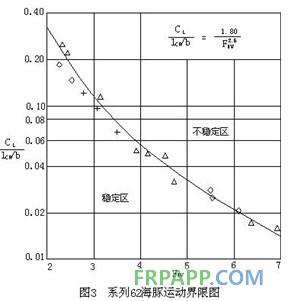
对于深V型滑行艇,建议使用文献[6]提供的计算方法。克莱门特(Clement)将62系 
4、快速性
过渡型快艇的棱形系数Cp值的选取与设计航速有关。一般按略小于“理论最佳棱形系数”的原则选定。这是因为这种艇的经常使用速度往往低于设计速度。取略小于最佳的棱形系数,对阻力性能是有利的,相反的如果取“最佳值”,使艇经常处于不利状态下。
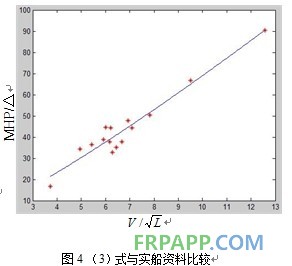
航速粗估在设计工作和营运工作中都是比较重要的,根据统计并回归,游艇航速与主机功率存在如下关系:
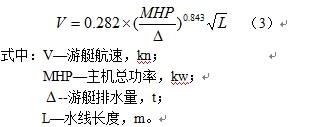
若将估算航速的(3)式与游艇资料绘制成图4,能很好地反映游艇的关系








 鲁ICP备2021047099号
鲁ICP备2021047099号